Einnorden mit Hilfe des Programms „N.I.N.A.“ mittels Plate Solving
Über das kostenfreie Programm N.I.N.A. (Version 2.0 HF1) lässt sich das Teleskop ohne freie Sicht auf den Polarstern ausrichten. Durch Drehung der Rektaszensionsachse fährt die Software drei Punkte an und macht jeweils ein Bild, welches über ‚Plate Solving‘ durch die theoretische Position bei der vorgegebenen Drehung abgeglichen wird. Voraussetzung ist hier ein vorher ausgeführtes „Star Alignment“ (Easy Align) und eine Fokussierung (siehe Menüpunkt ‚Vorgehensweise‘ – ‚Fokussieren mit der Bahtinov-Maske‘).
Information zu Plate Solving:
‚Plate Solving‘ ist vor allem für Anfänger auf dem Gebiet der Astrofotografie eine sehr nützliche Funktion. Hierbei erstellt die Software ein Bild vom Sternenhimmel, der gerade auf dem Chip abgebildet wird, und vergleicht dieses Sternenbild mit einer Datenbank. Wird hierbei die ASTAP Datenbank genutzt, kann diese lokal auf dem Rechner gespeichert werden, so dass kein Internet dafür benötigt wird. Heruntergeladen kann das Programm und die Datenbank unter https://www.hnsky.org/astap.htm.
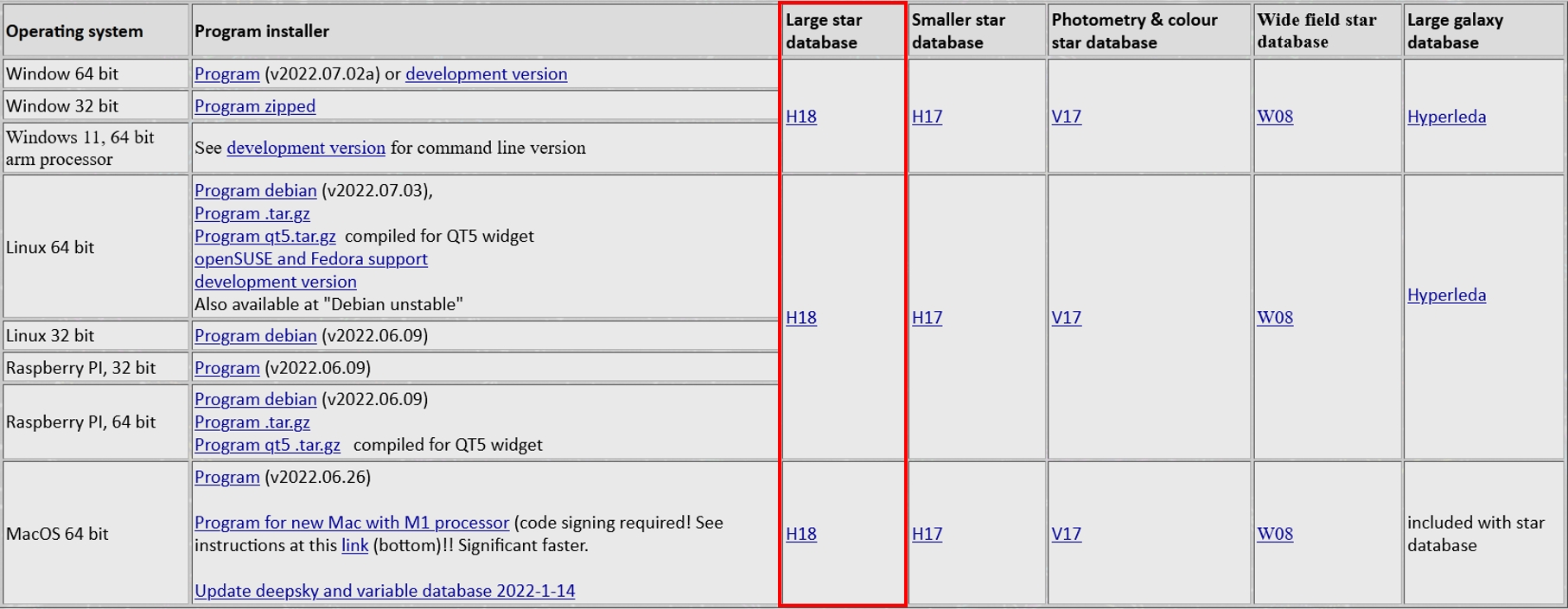
Nach Auswahl des Programms für das entsprechende Betriebssystem reicht es aus, wenn vorerst nur die ‚H18‘ Datenbank heruntergeladen wird. Diese wird in den Installationsordner des ASTAP-Programms installiert.
Danach muss in N.I.N.A. eingestellt werden, dass beim Plate Solving auf diese Datenbank zugegriffen werden soll. Hierfür sind unter dem Punkt ‚Optionen‘ bei ‚Plate Solving‘ die folgenden Einstellungen vorzunehmen:

Auf Grund des Abgleichs mit den Sternenbankbildern ermittelt die Software, auf welchen Punkt das Teleskop gerade ausgerichtet ist. Dieses Wissen ist nicht nur für das ‚Three Point Polar Alignment‘ wichtig, sondern vor allem auch beim Auffinden der Deep Sky Objekte. Nach dem ersten Ermitteln der Koordinaten kann die Software bei einer Abweichung exakt vorgeben, welcher Verfahrweg noch einmal nötig ist, um das Zielobjekt korrekt mittig auf dem Chip zu platzieren.
Eine wichtige Voraussetzung ist das richtige Einstellen der Brennweite des Teleskops (hier sind Zusatzelemente wie Reducer oder Barlow mit einzurechnen) und die Angabe der Pixelgröße der Kamera. Erst mit diesen Informationen ist eine ordentliche Auswertung beim Plate Solving möglich.

Um mit N.I.N.A. das Teleskop einzunorden, muss das Plugin ‚Three Point Polar Alignment‘ installiert werden.

Nach der Installation erscheint im Programm oben rechts unter ‚Werkzeuge‘ ein neues Icon.
![]()
Durch Aktivieren dieses Icons erscheint ein neuer Reiter im Fenster der Bilddarstellung und es kann mit der Ausrichtung begonnen werden.
| Schritt | Beschreibung | Darstellung |
| (1a) |
|  |
| (1b) |
|  |
| (1c) |
|  |
| (1d) |
|  |
| (1e) |
|  |
| (1f) |
Es sollte möglichst kein Schmalbandfilter im Strahlengang verbaut sein. Die Belichtungszeit würde sich dadurch sehr erhöhen und ein schnelles unkompliziertes Verstellen der Achsen wird erschwert. |  |
| (1g) |
|  |
| (1h) |
|  |
| (2) |
|  Anfahren der drei Punkte zum Plate Solving [1] Anfahren der drei Punkte zum Plate Solving [1] |
| (3) |
| 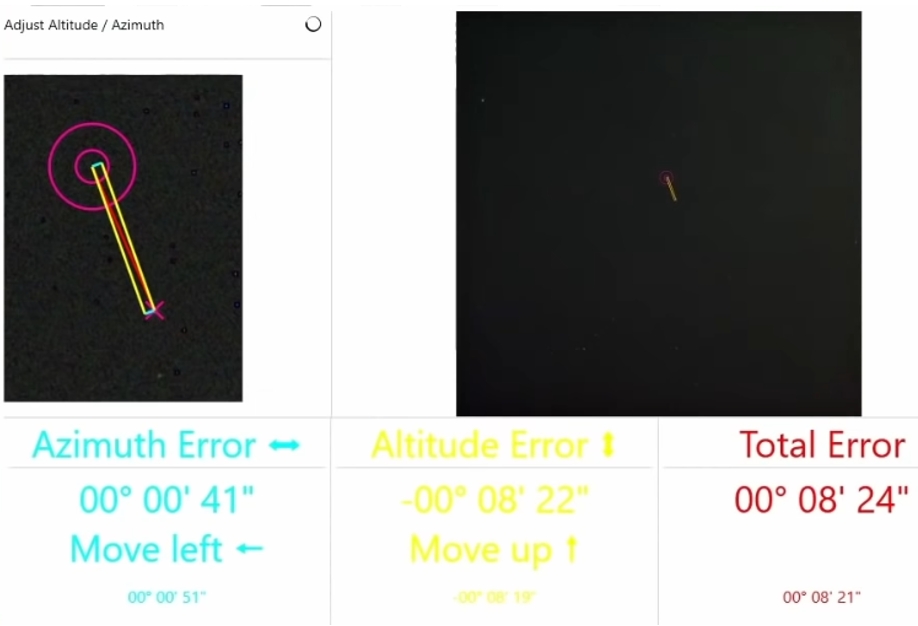 Aus dem Plate Solving berechnete Abweichungen [1] Aus dem Plate Solving berechnete Abweichungen [1] |
| (4) |
| 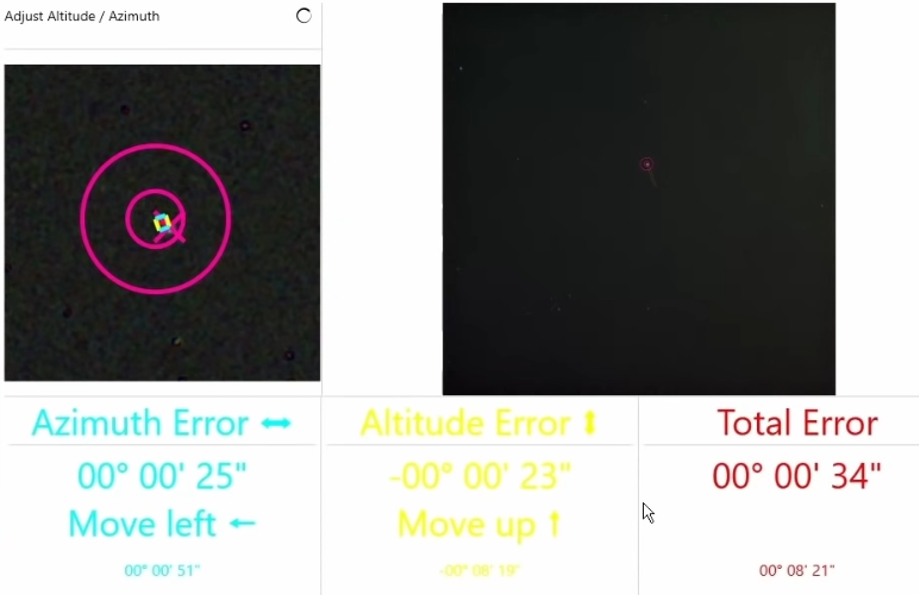 Durch Drehen der Azimutschraube und Polhöhenverstellung korrigierte Werte [1] Durch Drehen der Azimutschraube und Polhöhenverstellung korrigierte Werte [1] |
Quelle:
[1] https://www.youtube.com/watch?v=JI1tzoBhkH8